产品中心
|
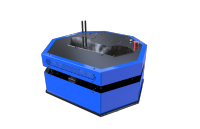
启明1服务机器人
收藏
商品说明
启明1服务机器人是一款面向服务型应用的机器人平台,主体结构包括大负载全向移动底盘、可升降的动力脊柱、高精度机械臂和宽视角的立体相机系统,功能上可完成动态目标跟随、语音对话交互和物品识别抓取等任务。机器人在硬件上采用了指标冗余设计,在保证功能多样性的同时具备极高的可靠性。除了进行学术研究之外,还帮助多个企业院校完成领导接待、电视采访和汇报演出等任务,充分展示了用户单位的学术水平,获得了极佳的科技展示效果。
启明1服务机器人的机械结构分为底盘、升降机构、机械手臂和头部四个部分。
启明1服务机器人采用了三轮全向式移动底盘,可以在不改变朝向的情况下沿水平的任何方向移动,提高运动过程中航姿调整的效率。
启明1服务机器人的背部设计了一个升降机构,机器人的上半身(包括机械臂和头部)可以在竖直方向上主动移动,为识别和抓取不同高度的物体提供了便利。
启明1服务机器人搭载了一条三自由度的机械手臂,手臂的末端是一个两指机械手爪。机械手臂闲置时可以折叠收拢,避免磕碰周围物体,提高机器人移动时的安全性。需要进行物品抓取时再伸长展开,非常适合移动式的服务机器人应用。
启明1服务机器人的头部安装了一台RGB-D立体相机,用来识别和定位作业范围内的目标物体,与机械手臂形成一个闭环操作。
启明1服务机器人的底盘上安装了一枚工业级激光雷达,扫描角度为270°,扫描距离为30米,能够实时检测出周围的障碍物分布,通过SLAM技术进行机器人的自身定位,为机器人的移动导航提供数据基础。
启明1服务机器人的底盘内置了一个三轴姿态测量系统,可以实时检测机体的朝向、翻滚及俯仰角度。为机器人的导航提供重要数据,让机器人在运动过程中随时发现倾倒风险,及时采取紧急措施。
启明1服务机器人的头部安装了一台RGB-D立体相机,可以输出RGB彩色视频流、Depth深度数据和三维点云,通过OpenCV和PCL等开源图像库,可以对目标物进行准确识别和定位,以便进行后续的机械臂抓取任务。
软件特性 1. URDF模型描述——启明1服务机器人运行ROS操作系统,具备完整的URDF模型描述,可以在ROS系统里直接加载。
2. 电机码盘里程计——启明1服务机器人装备了带编码器的直流伺服电机,可以在ROS里接收电机码盘计数,从而推算出机器人的移动里程信息。
3. IMU姿态传感——启明1服务机器人内置了一枚六轴的IMU单元,可以实时获取机器人的姿态信息,为机器人的上层控制算法提供数值依据。
4. 三维立体视觉——启明1服务机器人采用新一代的TOF立体相机,探测距离达到8米,最大视角70°,可以有效获取视野内的环境物体的三维信息。
5. 物品检测和抓取——启明1服务机器人通过立体相机获得三维点云,对点云中的物品进行检测和轮廓辨识,计算物品的尺寸和三维空间坐标,进而控制机械臂进行目标物品的抓取动作。
6. 人脸检测——启明1服务机器人支持Haar特征级联分类器,结合机器人头部的高分辨率摄像机,对环境中的人脸特征进行检测,并根据立体相机采集的点云,计算其三维空间坐标。
7. 自动充电——启明1服务机器人可以在周围搜索其专属的充电装置,自主引导进入充电坞进行充电。
8. 动态目标跟随——启明1服务机器人可以快速锁定一个跟踪目标,保持指定距离,一直尾随目标物进行移动。
9. SLAM环境建图——启明1服务机器人装备了一枚国外进口的高精度激光雷达,可以实时扫描机器人周围的障碍物分布状况,借助HectorSLAM和GMapping算法,创建环境地图。
10. 自主定位导航——启明1服务机器人将激光雷达扫描的距离信息与电机里程计数据进行融合,使用AMCL方法进行地图定位,结合ROS里的move_base进行自主导航。
11. 视觉SLAM——启明1服务机器人装备了一枚广角远距离的RGB-D相机,同时采集1080P的高清晰度视频流,是理想的单目视觉SLAM和RGBD-SLAM算法实验平台。硬件结构上还可以扩展双目立体相机,进行Stereo-SLAM的相关研究。
12. GAZEBO仿真系统——启明1服务机器人配备了完整的物理惯量和传感器参数描述,可以在GAZEBO仿真环境里直接加载。附赠的源码资源中,包含多个物理仿真场景,可以脱离机器人实体,在纯软件环境中先进行算法模拟。
扩展定制 启明1服务机器人在机械结构和电气组成上保持高度模块化,可以很方便的进行扩展和定制,打造符合用户需求的各种机型。
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||